Research in Chung-Chuan Lo Lab |
Our lab focuses on studying neuroinformatics and collective behavior of neural systems using computer modeling. Our approach is unique in two aspects:
| (1) | we simulate large scale networks using biologically realistic spiking neuron models with detailed synaptic dynamics and membrane properties, and |
| (2) | we analyze data using novel statistical tools specifically designed for neural systems. Furthermore, our research emphasizes close collaborations with experimentalists. |
We also collaborate with engineers on neuromorphic engineering. The goal is to translate knowledge we learned from neural systems to the designs of engineering systems.
We have the following major research projects:
(1)Drosophila Neuroinformatics & computational models
(The collaborator: Brain Research Center at National Tsing Hua University)
- Olfactory local circuit in Drosophila
- Drosophila full-brain simulation: the flysim system
- Central complex model
From an evolutionary perspective, olfaction is probably the oldest sensory system. However, it is still the least understood compared to other sensory modalities such as vision and audition. Nevertheless, there has been growing interest in the ultrasensitive detection of airborne molecules.
We study the fruit fly olfactory system in two stages, the antennal lobe and the mushroom body:
| 1) | We examine the data from neural circuits in fly antennal lobe from the FlyCircuit database provided by Dr. Ann-Shyn Chiang's team. We found the neural circuits are characterized by several complex patterns that cannot be explained by current theories and models of olfactory processing. We built a neural circuit model based on the data with an aim to understand the functions of the complex circuits in the antennal lobe of Drosophila.[Kao & Lo, 2020] |

Schematics of the fruit fly antennal lobe | |
| 2) | Investigating how olfactory information is encoded and decoded is critical for understanding mechanisms underlying learning and associative memory. Therefore, we analyze how olfactory projection neurons connect to downstream mushroom body intrinsic neurons. This work is based on the FlyCircuit database by Brain Research Center, National Tsing Hua University and the Neuprint database by Janelia Farm. The goal is to study the role of different network structures in information encoding and decoding. We also build spiking neural network models for the Mushroom body. |

Fruit fly olfactory neural circuits | |
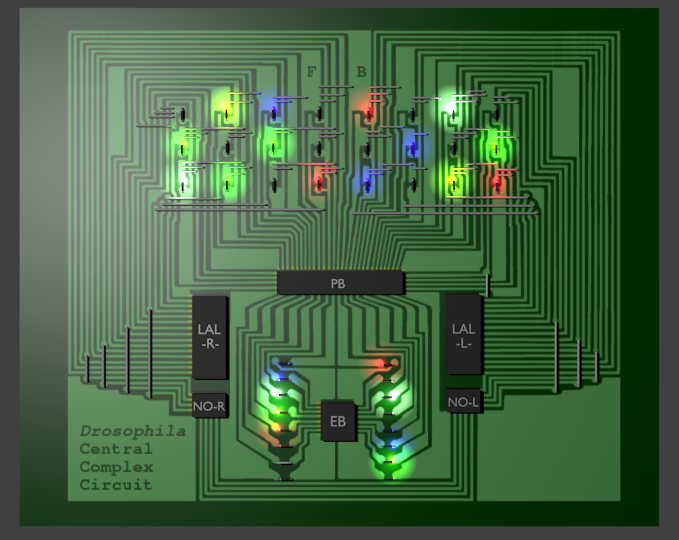
| To build a platform which translates a high-resolution Drosophila neuronal database into a whole-brain neural network model at the cellular and synaptic resolutions.We have established the basic infrastructure for the platform and translated the latest data from the Flycircuit database into a spiking neural network model with live visualization. [Huang & Wang et al, 2019] |

Full brain simulation of fruit fly |
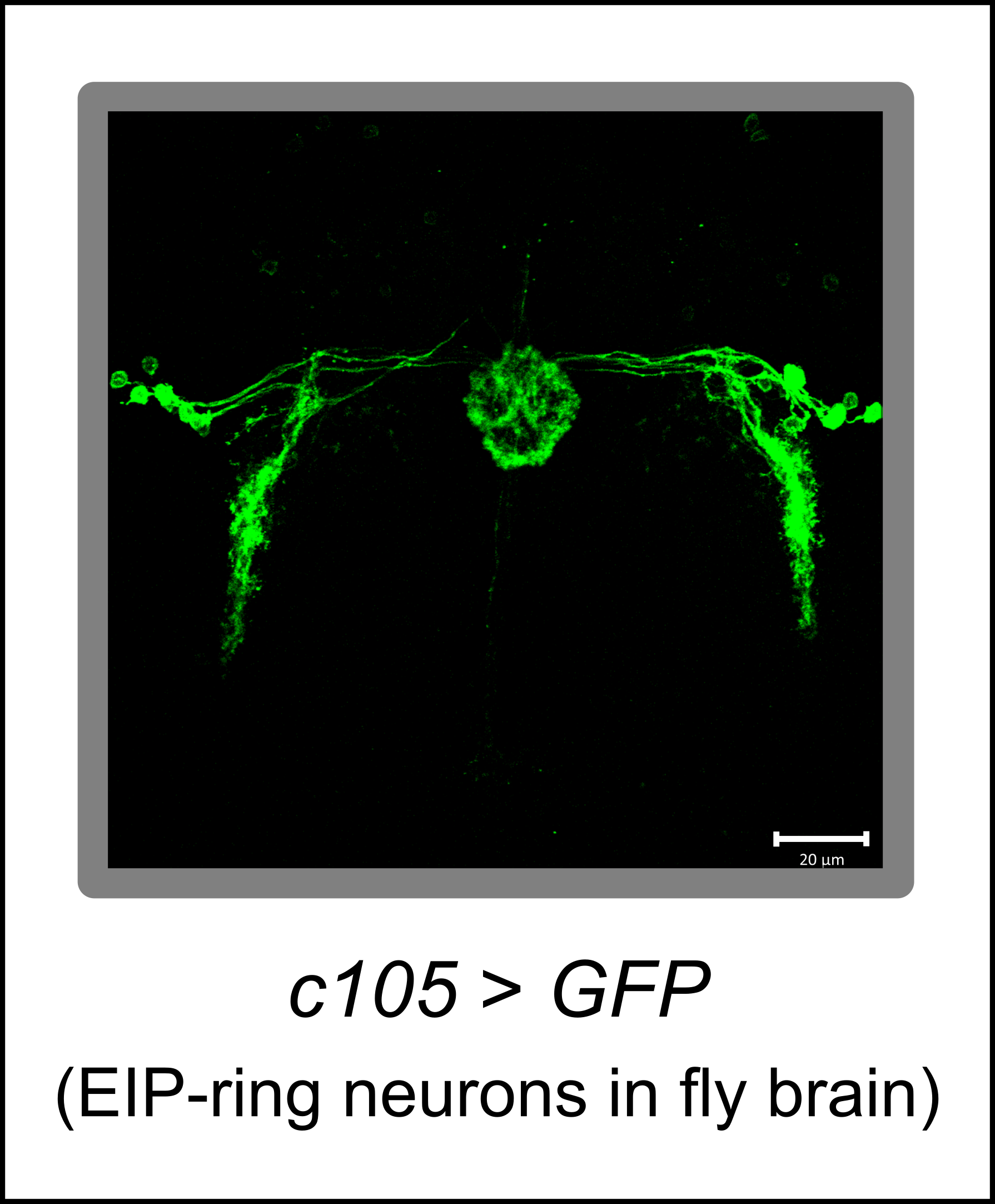
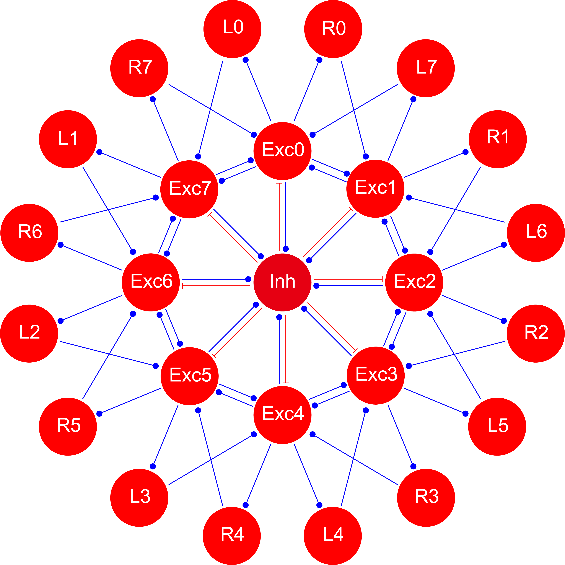
| To navigate in a complex environment, an animal needs to keep track of their location and orientation. A highly-organized structure in most insects called the central complex, is found to be responsible for encoding the head direction and controlling movement during navigation. To understand how the central complex works, it is crucial to investigate the organization principle of this circuit. To this end, we analyzed the structure of the central complex network and we found that the seemingly complex network structure can be described by simple mathematical rules.[Chang et al, 2017]
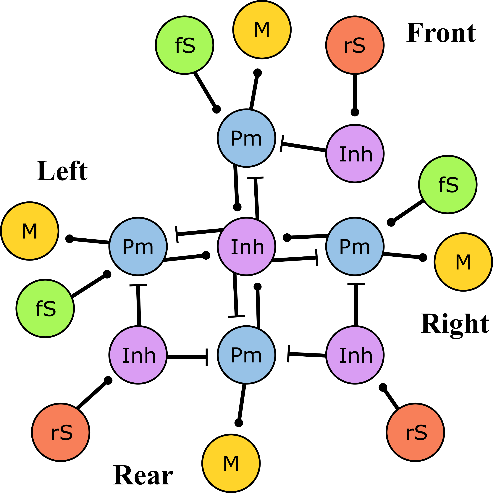
Based on this result and the connectome data published by other labs, we built a spiking neural network model to elucidate the underlying mechanism of spatial orientation.[Su et al, 2017] The model is characterized by two components: one is symmetrical and the other is asymmetrical, which maintains and updates the spatial orientation memory. The symmetrical circuit activates when a fruit fly stays still or moves straight, and the asymmetrical activates when the body rotates. We also perform neural functional experiments to verify our computational models. By developing models and conducting experiments, we will be able to study other high-level behavior, including decision making and spatial perception in fruit flies. |

The EB-PB circuit model. Symmetrical (left) and asymmetrical (right) components of the ellipsoid body - protocerebral bridge circuits in the central complex model (adapted from [Su et al, 2017]) |
(2)Neural Functional Experiments
- Spatial orientation working memory
- Virtual reality for fruit fly
| We study how the central complex and associated neurons play a role in fruit fly’s spatial orientation memory. We perform behavioral tasks which test whether fruit flies remember the location of landmarks after they disappear.[Yen et al, 2019][Han et al, 2021] By manipulating the activities of central complex neurons and observing how the manipulations affect the behavioral performance, we are able to test the predictions of our computational models[Su et al, 2017] and gain insight into the underlying mechanisms of fruit fly’s spatial memory.[Han et al, 2021] |

The spatial orientation memory task |
| Virtual reality setups have been used widely in fruit fly behavior studies. The question is how “real” this type of setup is to the fruit flies. To answer this question, we build a virtual reality environment for the fruit flies. In this setup, a tethered fly walks on a floating ball which is supported by precisely controlled air flows. The walking pattern of the fly can be decoded by the rotational movement of the ball. We compare the walking pattern of the tethered flies and free moving flies. We can further study navigation behavior of fruit flies using this setup. |

The fruit fly virtual reality setup |
(3)Neural circuit mechanisms of flexible brain functions
|
When it comes to AI, real brains still have one advantage: they are able to respond to novel situations easily. An unexpected surprise usually derails traditional AI, while real organisms deal with unforeseen situations on a daily basis. We consider these systems to be flexible, that is real nervous systems can deal with different tasks across many different situations. Our lab is trying to answer the question: “What makes the nervous system flexible?” Our primary hypothesis is that the recurrent structure of real brain networks allows neural networks to achieve much more flexibility that traditional Deep Neural Networks (DNN), which rely heavily on the synaptic weights to perform a particular task. By contrast a recurrent neural network is capable of embedding multiple different tasks into the same network (with the same synaptic weights). Our lab uses mathematical tools to probe how small microcircuits in these recurrent neural networks perform different tasks.[Liu et al, preprints] Furthermore, we use the same mathematical tools to control which functions these neural circuits can perform. Our work may have a great potential in designing compact neuromorphic chips for the next generation AI, some of which we have already patented. |

The nullcline plots of the CRIREL circuit |
(4)Neuromorphic Engineering
(The collaborator: ENIAC)
Media coverage: year 2020, year 2021
- Bio-inspired depth estimation algorithm
- A Bio-Inspired Optical-flow Circuit Model
- Bio-inspired control strategies for unmanned vehicles
| Depth (or distance) estimation is a core function in obstacle detection, and is required for building unmanned vehicles. Depth estimation can be categorized into two types of technologies: active or passive. The active depth estimation uses devices that emit ultrasound or electrical-magnetic waves, such as LIDAR or radar. On the other hand, passive depth estimation acquires distance information purely based on optical images, and is what most animals rely on during navigation. Inspired by the fruit fly visual system, we design a light-weighted passive distance estimation algorithm, which integrates the optical flow information and camera movement information to estimate the distance of any point in an image. This algorithm can be easily implemented in small computation platforms such as Raspberry Pi and achieves a speed of 100 frame/second or higher. This algorithm can also be implemented in neural networks and performed by neuromorphic chips. |

Depth estimation by our bio-inspired algorithm |
| Optical-flow provides valuable information for estimating the movement of a camera, as well as detecting moving objects in the environment. To acquire accurate optical-flow information, most algorithms are required to perform complex computation including inverting matrices and performing a recursive search. Inspired by the fruit fly visual system and the classical Reichardt Model, we design a Spatial-Temporal Filtering Reichardt Model for computing optical flow. The model uses convolution kernels and temporal filters to estimate the optical flow, and can be easily implemented in electronic circuits due to its feed-forward structure. This model can be integrated with our depth estimation algorithm to provide a full neuromorphic solution for obstacle detection. |

The Spatial-Temporal Filtering Reichardt Model |
| Modern robots heavily rely on complex algorithms or machine learning to perform specific tasks. However, animals can handle multiple simultaneous tasks like navigation, planning and exploration in complex environments. This suggests that bio-inspired strategies are the key to next generation robotics. In this study, we implemented a biologically realistic model of the fruit fly’s central complex in a small ground vehicle – FlyintelBot. [Yao et al, 2019] This ground vehicle can navigate in an arena and maintain spatial orientation. Our current efforts focus on implementing similar spiking neural network setups in unmanned aerial vehicles. | |
 FlyintelBot in an arena
FlyintelBot in an arena
|
 Our DIY drone
Our DIY drone
|
(5)Agent-based disease simulator
(The collaborator: Prof. Hsiao-Han Chang)
| Disease propagation among human social networks share some characteristics with signal propagation in neural network. We conducted a pioneering study on disease propagation by designing an agent-based simulator that models the disease propagation at the individual level. This has an advantage of giving a detailed setting for human interaction, as opposed to the more traditional population-based models. By combining the traditional SIR model with the agent-based model, we are able to stimulate each individual’s health status. In our simulator, each individual has unique settings for age, job, identity, health status and most importantly, life-style dependent movement patterns. Furthermore, we construct a map that can be used to simulate disease propagation in a small town or a college with highly realistic settings. |

Map of simulated communities in the disease propagation simulator |
Please check here for our past research projects.